온도 조절기 · 조절계는 PID 동작 것이 보통입니다.
이것을 PI 동작으로 사용하여도 P 동작 단독으로 사용해도 비용 차이는 없습니다.
그렇다면 모든 제어에 가장 좋은 제어를 얻을 수있을 터인, PID 제어를 사용해야합니까 듯합니다.
그러나 세상의 모든 것에는 장점과 단점이 있습니다.
장점 만 단점 없음이라는 것은 존재하지 않습니다.
언제든지 PID 제어가 우수하다고는 말할 수 없습니다.
목적이나 용도에 따라 PID 동작보다 P 동작, PI 동작, PD 동작이 더 적합한 경우도 있습니다.
구분이 필요합니다.
PID 제어는
제어 대상의 특성,
제어 장치의 특성,
사용 방법
제어 파라미터에 따라,
크게 바뀝니다.
제어 대상과 제어 장치 및이 정해지면, 그에 대한 가장 뛰어난 응답을 나타내는 최적의 제어 파라미터 값 (PID 제어이면 비례 폭 X %, 적분 시간 Ti 초 미분 시간 Td 초)가 존재 있습니다.
제어 대상이 제어 장치에 맞는 최적의 제어 파라미터의 값을 구하고, 그 값으로 설정하는 것이 좋습니다.
에서는 어떤 반응이 가장 좋은 것입니까?
각각의 제어 대상에 따라 중요시하는 매개 변수가 다릅니다.
제어 대상은 무엇을 중요시 할지도 달라집니다.
① 목표 도달 시간의 속도
② 오버 슈트 / 언더 슈트의 억제
③ 자전거 (헌팅)의 안정성
④ 오프셋 수정 시간
⑤ 외란의 수정 시간의 속도
매개 변수는 서로 관련되어 영향을 서로 저쪽을 세우면 이쪽이 서지 않는다는 관계가 있습니다.
최적의 응답이 손상됩니다.
따라서 높은 범용성을 가진 초기 설정은 존재하지 않습니다.
각각의 제어 대상마다 설정해야합니다.
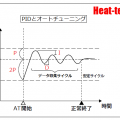
그 때문에, PID 오토 튜닝 기능이 있습니다.
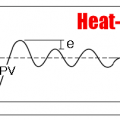
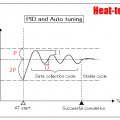
PID 오토 튜닝은 장치의 가열 용이성과 방열 냉각에 의한 강온 속도를 초기 단계에서 데이터 제거합니다. 가장 일반적인 것은 3주기 상하로 데이터 제거를하여 매개 변수를 결정합니다.
따라서 장시간 운전하면 장치 전체가 따뜻해지고 축열되어 초기 가열 승온 시간과 방열 강온 시간에서 차이가 발생합니다. 이 현상을 일반적으로 ‘드리프트’라고합니다.
많은 현장에서는 온도 드리프트에 의한 매개 변수의 엇갈림을 방지하기 위해 워밍업 후 다시 PID 오토 튜닝을 실행하여 매개 변수를 검색합니다.
또한 모델에 따라 일정한 경과 시간에 PID를 다시 설정하는 것도 있습니다.
그러나 PID 오토 튜닝은 “PID를 모두 사용 ‘이라는 전제에서 설정되어 있습니다. 대부분의 경우 그것은 최적의 파라미터가 설정되지만, 고급 제어를 원하시는 분들은 아래의 특성을 파악하고 구별하세요.
● P 동작 (비례 동작) 단독으로는 응답도 나쁘지 오프셋이 생깁니다. 그러나 오프셋이 태어난 무방 환경에서 반응이 매우 비싼 장비는 D와 I없는 간단한 제어가 좋은 경우가 있습니다.
● I 동작 (적분 동작)은 단독으로도 제어 능력이 있습니다. 따라서 I 동작 만 제어가 가능합니다. 그러나 PI 동작에 비해 크게 제어 응답이 나빠집니다. 오버 슈팅을 피하고 싶은 제어에 적합합니다.
● PI 동작 (비례 적분 동작)은 다소 제어 응답이 나빠집니다 만 오버 슈트가 나와 곤란합니다.
또한 큰 낭비 시간이있는 경우에는 D 동작을 하이 게인에수록 불안정 때문에 D 동작이없는 것이 좋은 경우도 있습니다.
● D 동작 (미분 동작)은 제어 응답의 개선에 사용됩니다. I 동작과 달리 D 동작은 단독으로 제어 능력이 없습니다. P 동작과 함께, PD 동작으로 사용합니다.
● PD 동작 (미분 동작)은 목표치 변화의 경우 P 동작 단독 (미분 시간 Td = 0)에 비해 제어 응답이 빨라집니다.
상승 목표 온도 도달이 우선하여 오버 슈트해도 상관없는 제어에 적합합니다.
PD 동작은 온도 편차를 수렴시키는 것은 불가능합니다. D 동작을 듣지 많으면 헌팅의 기본입니다.
■ PID 제어 조언 (PID 제어 파라미터의 결정)
● P 시간 증가
○ 오버 슈트하지 않게됩니다.
× 천천히 상승 정정 시간이 오래 걸립니다.
× P 값이 너무 크면 목표 온도에서 떨어진 온도에서 비례 동작이 효과내는 데 도달 시간이 걸릴 것 오프셋도 커집니다.
● P 시간 감소
○ 설정 값 도달 시간이 짧아집니다.
× 오버 슈트가 발생하기 쉬워집니다.
× P의 값을 너무 작게하면 이번에는 온 오프 동작에 접근, 사이클링 현상 (헌팅)이 발생하게됩니다.
● I 시간의 증가
○ 헌팅이나 오버 슈트, 언더 슈트가 작아집니다.
× 설정 될 때까지의 시간이 길어집니다.
● I 시간 감소
○ 빨리 상승합니다.
× 완만 한 헌팅이 발생하거나, 오버 슈트 언더 슈트를 반복하여 수렴하는 경우가 있습니다.
× 수렴하는 데 시간이 걸립니다.
● D 시간의 증가
○ 목표 온도로 승온시 온도 상승을 억제하는 작용도하기 때문에 지나친도 막는 효과가 있습니다.
× 자신의 변화에 미세한 헌팅을 발생합니다.
● D 시간 감소
○ 외란의 온도 변화에 대한 응답 성이 좋아집니다.
× 외란시의 오버 액션이 커지고, 설정 값으로 돌아 가기까지 시간이 걸립니다.