INDEX



PID 조절계에서 좋은 제어를 위해서는 제어 대상에 맞는 적절한 PID 정수를 설정해야합니다.
PID 정수를 조정할 것을 “튜닝”라고 부르고 있으며, 아날로그 조절계가 전성기 시절이 튜닝을 운영자가 수동으로 실시했습니다.
PID의 최적 값을 구하기 위해서는 많은 경험과 지식을 필요로했습니다.
조절계가 아날로그에서 디지털 방식으로 전환하고 마이크로 컴퓨터가 내장되면, 제어 대상에 따라 PID 정수의 자동 산출 및 설정을 실시하는 「오토 튜닝 기능 ‘이 탑재되게되고, 또한 최근에는 오토 튜닝보다 더 지능적인 셀프 튜닝 기능도 탑재되어 있습니다.
■ 오토 튜닝 기능
온도 제어를 할 PID 정수는 제어 대상의 특성에 따라, 숫자 조합이 다릅니다. 종래부터 이러한 PID 정수를 실제 제어하는 온도 파형보다 도출 방법이 여러 가지 제안 실시되고 있습니다. 다양한 제어 대상에서도 적절한 제어를 할 수있는 PID 정수를이 방법으로 도출 방법을 오토 튜닝이라고 대표적인 수법으로서, 스텝 응답 법, 한계 감도 법 리미트 사이클 법이 있습니다.
● 스텝 응답 법
설정 값을 가장 자주 사용하는 값으로합니다. 조작량 100 %를 계단식으로 출력 최대 온도 경사 (R)과 안일 시간 (L)을 측정하고 R과 L의 값보다 PID 정수를 산출합니다.
● 한계 감도 법
시작 시점 (A 지점)에서 비례 동작을 시작합니다. 비례의 폭을 조금씩 좁혀 가고 온도 진동을 발생시킵니다. 이 때의 비례 값과 진동의주기 (T)보다 PID 정수를 산출합니다.
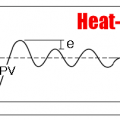
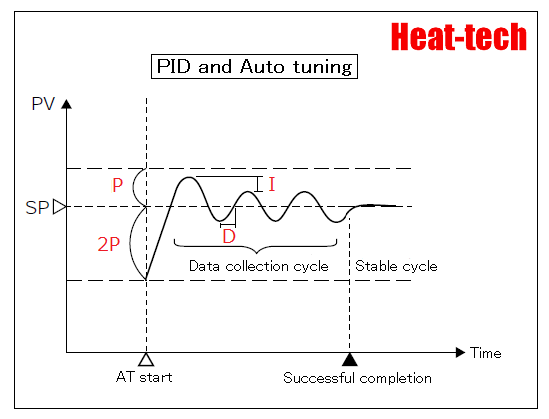
● 리미트 사이클 법
시작 시점 (A 지점)에서 ON / OFF 동작을 시작합니다. 이로 인해 발생하는 헌팅의주기 (T)과 진폭 (D) 값보다 PID 정수를 산출합니다.
■ 셀프 튜닝 기능
셀프 튜닝 기능은 일상적인 운전시의 조작과 제어 상태가 좋지 않을 경우 자동으로 실행하고 PID 정수의 산출 및 설정합니다.
● 전원 투입 목표 값 변경, STOP → RUN을 수행했다]
● [제어 응답이 진동했다]
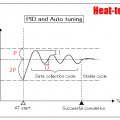
① 전원 투입 목표 값 변경, STOP → RUN 변경시 셀프 튜닝
전원 투입 · 목표치 변경 STOP → RUN시의 목표치 응답 파형을 관측하고 PID 정수를 자동 산출합니다.
특징은 “PID 정수 계산”때 “파형 관측 처리”에 따라 목표치 응답 파형을 평가하고 응답이 좋지 않은 경우에만 산출 된 PID 정수를 설정하는 곳입니다.
(목표치 응답 파형이 양호한 경우에는 산출 된 PID 정수의 집합은 실시하지 않습니다.)
따라서, 목표 값 변경시의 응답은 목표 값 변경시에 설정되어있는 PID 정수에 따라 달라집니다.
(이 때, 목표치 응답이 좋지 않으면 시작 AT 따라 PID 파라미터의 수정이 이루어지기 때문에, 다음 목표 값 변경시에서 좋은 목표치 응답을 얻을 수 있습니다.)
● 셀프 튜닝에 의한 PID 정수의 산출에 대해
셀프 튜닝 기능은 목표치 변경 또는 전원이 이루어진 시점에서 목표 값에 안정 될 때까지의 관측 양의 응답에서 PID 정수를 산출합니다.
산출 된 PID 정수는 목표치에 대한 응답이 나쁜 경우에만 컨트롤러로 설정됩니다.
● 목표치 응답의 평가에 대해
‘응답 속도’ ‘지나친 양 “”감쇠 “를 평가합니다.
● 셀프 튜닝에 의해 PID 정수가 변경되는 타이밍
응답 평가 결과 “응답 불량”으로 평가 된 타이밍에 새로운 PID 정수를 설정합니다.
② 제어 응답이 진동 할 때 셀프 튜닝
제어 대상의 특성 변화와 운전 조건의 변화 등에 의해 제어 응답이 진동으로되었을 때, 진동을 수렴하도록 PID 파라미터를 자동으로 수정하는 셀프 튜닝 기능입니다.
● 진동 셀프 튜닝에 의한 PID 정수의 산출에 대해
셀프 튜닝 기능은 관측 양의 응답 파형 (진동 응답)로 PID 정수를 산출합니다.
● 진동시 자체 조정에 따라 PID 상수가 변경되는 타이밍
관측 량이 지속적으로 진동하고 진동 감쇠율이 양호하지 않다고 판단 된 시점에서 새로운 PID 정수를 설정합니다.
■ 셀프 튜닝 기능을 사용하는 데있어서
● 컨트롤러의 전원 투입시에는 히터 전원 등 제어 대상의 전원을 미리 투입 해 두십시오.
“전원 켜기 · 목표 값 변경”셀프 튜닝 기능은 목표치 변경 또는 전원이 이루어진 시점에서 목표 값에 안정 될 때까지의 관측 양의 응답에서 PID 정수를 산출합니다.
따라서 컨트롤러의 전원을 켤 때 히터 전원 등 제어 대상의 전원이 공급되지 않으면, 측정 된 응답 및 본래의 응답이 다른 것이되기 때문에 셀프 튜닝에 의해 부적당 한 PID 정수 이 산출 · 설정 될 수 있습니다.
● 다음과 같은 제어 대상은 자체 조정 부적당 한 PID 정수가 세트되는 경우가 있으므로, 셀프 튜닝 기능을 사용하지 마십시오.
① 주기적으로 큰 외란 (통제 외란)이 나오도록 제어 대상
(예 : 사출 성형기의 금형 온도 조절, 반도체 제조 장치의 핫 플레이트의 온도 조절)
② 상호 간섭에 매우 강한 제어 대상
그러나 압출기 실린더 부분의 온도 제어 등 상호 간섭이 너무 크지 제어 대상이면 문제 없습니다.
“진동시 ‘셀프 튜닝 기능은 PID 정수의 불일치 (P : 소형, I : 작은 D : 대 등)로 인해 진동 한 경우, PID 정수의 게인을 적절하게 풀어 진동에 맞게 작동합니다.
따라서, 상기 ①, ②와 같은주기적인 외란의 영향으로 외관상 진동하고있는 것처럼 보인다 응답에 대해서도 동일하게 작동하기 때문 결과적으로 자체 조정 PID 정수 느슨해 수정 된 버립니다.
일반적으로 상기 ①, ② 등의 영향을 억제하기 위해서는, PID 정수를 온 번째 수정해야하기 때문에 진동시의 자체 조정에서는 이러한 조건에서의 최적 상수는 계산되지 않습니다.
또한, 상기 한 조건에서 자체 조정 기능을 작동시킨 경우 PID 정수 설정이 취약하기 때문에 목표치 변경이나 외란에 대한 응답이 느린됩니다.
■ 「오토 튜닝」와 「셀프 튜닝 “의 차이점은?
* 오토 튜닝 기능을 “AT”셀프 튜닝 기능을 “ST”로 나타냅니다.
● 기본 동작
(AT) 온 / 오프 제어의 응답에서 PID 정수를 산출 · 설정하기
(ST) 특별한 조작없이 컨트롤러 스스로 제어 응답을 관찰하고 PID 정수를 적절한 값으로 변경한다.
● 계산 결과
(AT) 1 회 조정으로 최적의 PID 값이 구해진다
(ST) 1 회 조정으로 최적의 PID 상수 값에 수렴하지 않을 수있다
● 튜닝의 실행
(AT) 수동으로 오토 튜닝의 실행을 지시 할 필요가있다.
(ST) 컨트롤러에서 자동 실행
(ST) 목표치 변경하거나 응답을 진동으로되는 등 제어 상태가 변화하지 않으면 실행되지 않는다
● 튜닝 중 응답
(AT) On / Off 제어를위한 제어가 흐트러.
(ST) 온 / 오프 제어를하지 않기 때문에 제어를 방해한다.
● 제어 대상의 특성 변동시
(AT) 다시 오토 튜닝을 실행해야
(ST) 컨트롤러에서 자동으로 PID 정수를 설정하는
셀프 튜닝 기능 오토 튜닝 기능과는 달리, 일반 제어 응답 파형을 관측하여 PID 정수를 자동 산출 · 자동 설정하는 기능입니다.
■ 결론
① 장치 시작시 첫 튜닝은 1 회에 좋은 상수가 구해진다 “오토 튜닝”을 이용하여 「오토 튜닝」이후의 특성 변동에 대해서는 “셀프 튜닝”에 대응하는 방법이있다 생각합니다 .
② 오토 튜닝을 사용할 수없는 조건이 있습니다.
이러한 경우 오토 튜닝을 사용하지 않고 수동으로 조정을해야합니다.