INDEX
■ PID 특징
오프셋도없고 원하는 제어 응답도 빨리하고 싶다. 이 모두를 만족시키는 PID를 동작을 사용합니다.
PID 제어의 기본은
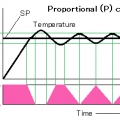
1) 현재의 편차에 비례 한 수정 양을내는 비례 동작 (Proportional Action : P 동작)과,
2) 과거의 편차의 누적 값에 비례 한 수정 양을내는 적분 동작 (Integral Action : I 동작)과,
3) 미래의 예측 값 편차가 증가하고 있는지 감소하고 있는지 그 경향의 크기에 비례 한 수정 양을내는 미분 동작 (Derivative Action : D 동작)
PID는이 세 가지를 가산 합성 한 것입니다.
이것은 “동특성 ‘라는 입상 때 발휘되는 특징입니다.
또한 PID 제어는 목표 값과 실제 값 사이에 차이가 발생했을 때, 즉 편차가 발생했을 때,
4) 비례 동작은 편차의 변화에 즉시 応動하는 “대응 추종”동작을하고
5) 적분 동작은 편차가 제로가 될 때까지, 즉 목표 값과 실제 값이 딱 일치 할 때까지 제어 출력을 내고 계속하는 「계속 추종 “동작을하고
6) 미분 동작은 편차의 변화율의 크기에서 미래의 움직임을 예측하고 이에 대응하는 제어 출력을 낸다 “예견 추종”동작을하고 있습니다.
즉, PID 제어는 변화에 대해 “대응 추종 ‘,’계속 추종”및 “예견 추종”라는 동작을 조합하여 제어를 실행하는 것에도됩니다.
이것은 “정 특성”이라는 안정 상태에서 발휘되는 특징입니다.
불과 3 개의 요소로이 “현재 · 과거 · 미래 ‘와’대응 · 계속 · 예측 ‘이라는 6 가지 측면에서 「동특성」와 「정 특성’이라는 두 가지 상태에서 안정 제어 할 수 있으므로, 발명 되고 나서 나오 백년 후에도 많은 곳에서 사용되고 있습니다.
■ PID의 발전
 제어의 발전")

● 고대 로마에서는 물 전달 시스템의 사이펀을 위해 수도관의 공기를 뺄 필요가있었습니다.
 제어의 발전")
석재의 공기 빼기 밸브가 사용되고있었습니다.
만수시에는 마개로 막지 않으면, 구멍에서 누수하고 절벽 붕괴 등 트러블의 원인이 됩니다.
간단하지만 ON 조치 OFF 제어의 기원입니다.
 제어의 발전")


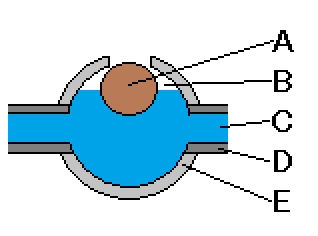
공기 빼기 밸브의 구조
A 플로트
B 공기 고임
C 물
D 수도관
E 돌을 파낸 밸브 상자
수도관에 혼입 된 공기는 수위를 낮추고 플로트도 낮추기 때문에 배기구를 열고 외부로 방출된다.
공기가 적을 때는 수위가 올라 플로트도 상승하고 배기구 닫기


● 제임스 와트
(James Watt, 1736 – 1819 스코틀랜드의 엔지니어)
1778 년 증기 기관의 출력을 나타내는 단위로 ‘마력’라는 단위도 만들었습니다.
증기 엔진 제어하기 위해 원심 진자 (flyball)에 의한 비례 방식으로 밸브의 개도 제어 장치를 개발했습니다.
 제어의 발전")
플라이 볼

 제어의 발전")
플라이 볼의 구조



● 도뿌로니
(Gaspard Clair François Marie Riche de Prony 1755-1839 프랑스의 수학자 · 수력 엔지니어
 제어의 발전")
주파수 분석 Prony 법의 발안자이기도하다 도부로니가 1791 년에 적분 제어 방법을 개발했습니다.

●슬로프
(Horatio Nelson Throop 1807-1884 미국의 조선 회사 · 선장)
1857 년 증기 기관의 제어를위한 비례 미분 제어를 개발했습니다.


● 제임스 클러 크 맥스웰
(James Clerk Maxwell, 1831 – 1879 스코틀랜드의 이론 물리학 자 ‘맥스웰의 도깨비’로 유명한)
1868 년 제어 동작의 역학적 연구를 수행하고 안정 제어 조건을 해명했다 “On Governor”라는 논문을 발표했다.

“On Governor”표지


● 엘머 암브로스 ·스뻬리 시니어
(Elmer Ambrose Sperry 1860-1930 미국의 발명가 · 기업가
그는 “현대 탐색 기술의 아버지”로 알려져있었습니다.
 제어의 발전")

1911 년 선박의 자동 조타를 위해 선박 자이로 컴퍼스를 사용하여 PID 제어기를 개발했습니다.
")

● 미국 폭스 버러 사 (Foxboro)
2014 년부터 슈나이더 일렉트릭
1912 년에 설정 값을 변경할 수 ON-OFF 제어 장치가 개발되었습니다.


● 1922 년 니콜라스 미노르스키
(Nicolas Minorsky 1885-1970 미국의 수학자)가 뻬리 고안 한 선박의 자동 조타 용 PID를 논문 화했습니다.
 제어의 발전")
1922 년 뻬리 고안 한 선박의 자동 조타 용 PID를 논문 화했습니다.
")

● 미국 폭스 버러 사 (Foxboro)
2014 년부터 슈나이더 일렉트릭
1931 년 스타비로구 Stabilog Model 10로 명명 된 공기 차동식 PI 조절기가 생성되었습니다.


● 미국 테일러 인스트루먼트 사
(Taylor instruments 현재 ABB 사의 일부)
● 1936 년 「더블 응답 플러스 전체 범위 ‘로 명명 된 공기 식 가변형 PI 조절기가 생성되었습니다. 이것은 PID 조절기의 원형이라고도 알려져 있습니다.
 제어의 발전")

● 1939 년 전체 범위 100으로 명명 된 기록 기능 가변형 PID 조절기가 생성되었습니다.