PID操作對於溫度控制器和指示控制器是通用的。
在PI操作或僅在P操作中使用時,成本沒有差異。
那麼似乎應該使用PID控制,它應該為所有控制提供最佳控制。
但是,世界上的一切都有其優點和缺點。
沒有一件事情是好的,也沒有缺點。
PID控制並不總是很好。
根據目的和應用,P操作,PI操作和PD操作可能比PID操作更合適。
用戶需要正確使用它們。
PID控制是
被控對象的特徵
控制裝置的特點
用法
根據控制參數,
它變化很大。
一旦確定了控制目標和控制設備,就會有最佳控制參數值(比例寬度X%,積分時間Ti秒,微分時間Td秒)顯示出對它們的最佳響應。
最好根據控制目標和控制設備找到最佳控制參數值,並將其設置為該值。
那麼最好的回應是什麼?
重要參數因每個控制目標而異。
重要的取決於控制目標。
①達到目標的時間
②抑製過衝/下衝
③騎行(打獵)穩定性
④偏移校正時間
⑤干擾校正速度
這些參數彼此之間相互影響,並且如果設置了這些參數,它們將不起作用。
最佳響應是這些之間的折衷。
因此,沒有通用的初始化。
必須為每個控制目標設置它。
為此,有一個PID自動調節功能。
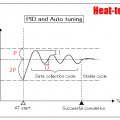
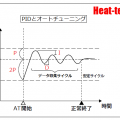
PID自調諧會收集有關設備加熱的難易程度以及由於初始階段的散熱冷卻而導致的溫度降低率的數據。 最常見的參數需要在三個週期內上下移動數據並確定參數。
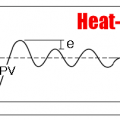
因此,如果機器長時間運行,則整個系統將被預熱並存儲熱量,從而在初始加熱和加熱時間與散熱和冷卻時間之間產生間隙。 這種現象通常稱為“溫度漂移”。
在許多站點,為避免參數因溫度漂移而出現偏差,在預熱操作後將再次執行PID自調諧以獲取參數。
此外,某些型號會在一段時間後重置PID。
但是,PID自動調諧是在“使用所有PID”的前提下設置的。在大多數情況下,最佳參數將進行相應設置,但是如果用戶想進行更高級的控制,請了解以下特徵並正確使用它們。
●單獨的P運算(比例運算)響應較差並產生偏移。但是,在可以產生偏移的環境中,不帶D和I的簡單控制對於響應極高的設備可能會更好。
●I操作(集成操作)甚至具有控制能力。因此,只能控制I操作。但是,控制響應比PI操作差很多。適用於控制以避免過衝。
●在PI操作(比例積分操作)中,控制響應會稍有下降,但不太可能發生過衝。
同樣,如果死區時間較長,D操作的增益越高,則變得越不穩定,在某些情況下,最好不要執行D操作。
●D操作(微分操作)用於改善控制響應。 與I操作不同,D操作本身沒有控制能力。 與P操作一起使用,並用作PD操作。
●在PD操作(微分操作)的情況下,當目標值更改時,控制響應比單獨在P操作的情況下更快(微分時間Td = 0)。
如果優先考慮啟動時的目標溫度,則適用於過衝無關緊要的控制。
在PD操作中,溫度偏差無法收斂。 如果用戶使D操作過於有效,它將成為狩獵的基礎。
■PID控制技巧(如何確定PID控制參數)
●增加P時間
○不會超調。
×需要很長時間才能慢慢解決。
如果xP的值太大,則比例運算將在遠離目標溫度的溫度下生效,並且需要更長的時間才能達到,並且偏移量也會增加。
●減少P時間
○縮短了達到設定值的時間。
×可能會發生過衝。
×如果將P的值設置得太小,則會發生循環現象(波動),這次接近開/關操作。
●增加時間
○減少了振盪,超調和下衝。
×達到設定值的時間更長。
●減少I時間
○起得很早。
×可能會出現緩慢的振盪,或者可能會反復出現過衝/下衝以收斂。
×收斂需要時間。
●D時間增加
○當溫度上升到目標溫度時,它還起到抑制溫度上升的作用,具有防止過衝的作用。
×某些狩獵是由用戶自己的更改引起的。
●D時間減少
○改善了對乾擾溫度變化的響應能力。
×干擾時的過度反應會增加,並且需要一些時間才能返回到設定值。