INDEX



為了用PID控制器執行良好的控制,必鬚根據控制目標設置適當的PID常數。
調整PID常數稱為“調整”,當模擬控制器達到峰值時,操作員會對其進行手動調整。
找到PID的最佳值需要大量的經驗和知識。
當控制器從模擬類型轉換為數字類型並內置微型計算機時,將安裝“自動調諧功能”,該功能會根據控制目標自動計算並設置PID常數。 它具有自調諧功能,比自動調諧更智能。
■自動調諧功能
用於溫度控制的PID常數的數值和組合取決於控制目標的特性。傳統上,已經提出並實施了各種方法來從實際控制的溫度波形中導出這些PID常數。使用這些方法來導出允許對各種受控對象進行適當控制的PID常數的方法稱為自動調諧,典型方法包括階躍響應法,極限靈敏度法和極限循環法。
●階躍響應方式
將設置設置為最常用的值。逐步輸出100%的運算量,測量最大溫度梯度(R)和停滯時間(L),並根據R和L的值計算PID常數。
●極限靈敏度法
比例操作從開始時間開始(A點)。比例帶的寬度逐漸減小以產生溫度振盪。根據比例帶的值和振動週期(T)計算PID常數。
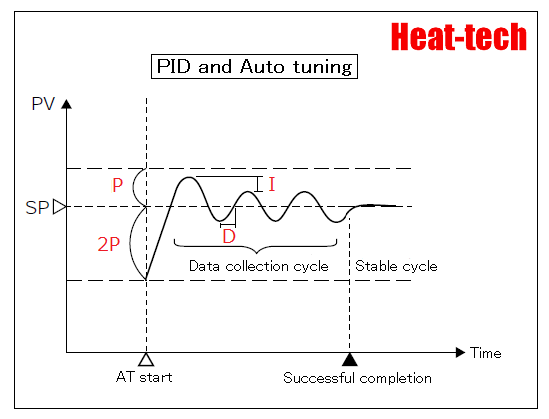
●極限循環法
ON / OFF操作從開始時間(A點)開始。 根據搜索週期(T)和由此產生的振幅(D)的值來計算PID常數。
■自調諧功能
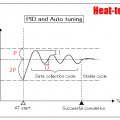
自調諧功能在日常運行中或控制條件不好時自動執行,併計算和設置PID常數。
●[打開電源,更改目標值,停止→運行]
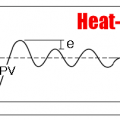
●[控制響應振動]
①供電,更改目標值,更改STOP→RUN時進行自調諧
打開電源,更改目標值,並觀察STOP→RUNSTOP時的目標值響應波形,並自動計算PID常數。
其特徵在於,與“ PID常數的計算”同時,通過“波形觀察處理”對目標值響應波形進行評價,並且設定僅在響應不良時計算出的PID常數。
(如果目標值響應波形良好,則不會設置計算出的PID常數。)
因此,更改目標值時的響應取決於更改目標值時設置的PID常數。
(這時,如果目標值響應不好,則PID參數將由啟動AT進行校正,因此可以從下一次目標值更改中獲得良好的目標值響應。)
●通過自調諧計算PID常數
自調諧功能根據從改變目標值或接通電源直到目標值穩定為止的觀測量的響應來計算PID常數。
僅當對目標值的響應較差時,才在控制器中設置計算出的PID常數。
●關於目標值響應的評估
評估“響應速度”,“超調量”和“衰減量”。
●通過自調諧更改PID常數時
在響應被評估為“響應失敗”時,設置一個新的PID常數。
②控制響應振動時的自調諧
這是一種自調諧功能,可自動校正PID參數,以便當由於被控制對象的特性變化或操作條件變化而導致控制響應振盪時,振動會聚。
●通過振動自調諧計算PID常數
自調諧功能根據觀測量的響應波形(振動響應)計算PID常數。
●在振動過程中通過自調諧更改PID常數的時間
當確定觀察到的量連續振盪並且減振率不好時,設置新的PID常數。
■使用自調諧功能時
●接通控制器電源時,請事先接通加熱器電源等控制電源。
“上電/目標值改變”時的自調諧功能根據從改變目標值或打開電源到目標值穩定為止的觀測量的響應來計算PID常數。
因此,如果在打開控制器時未打開諸如加熱器功率之類的控制對象的功率,則[測量響應]和[響應]將不同。可以計算和設置。
●請勿將自調諧功能用於以下控制對象,因為可能會通過自調諧設置不合適的PID常數。
①週期性進入較大干擾(不可控制干擾)的受控對象
(例如:注塑機的模具溫度控制,半導體製造設備的熱板溫度控制)
②相互干擾強烈的控制對象
但是,如果相互干擾不是很大,例如擠出機筒的溫度控制,就沒有問題。
“振動”時的自調諧功能是,當由於PID常數不匹配(P:小,I:小,D:大等)而發生振動時,PID常數的增益會適當地放鬆,從而使振動穩定。 作品。
因此,對由於上述①,②等周期性干擾的影響而振動的響應進行相同的操作,其結果,PID常數通過自調諧而被鬆散地校正。 我會的
通常,為了抑制上述(1),(2)等的影響,需要更嚴格地修改PID常數,因此,在這些條件下,振動時的自調諧不能算出最佳常數。
同樣,當自調諧功能在上述條件下運行時,由於PID常數的設置太鬆,對目標值變化或乾擾的響應變慢。
■“自動調諧”和“自調諧”之間有什麼區別?
*自動調諧功能顯示為“ AT”,自調諧功能顯示為“ ST”。
●基本操作
(AT)根據開/關控制的響應計算並設置PID常數
(ST)控制器本身無需任何特殊操作即可觀察控制響應,並將PID常數更改為適當的值。
●計算結果
(AT)一次訓練即可獲得最佳PID值
(ST)一種調整可能不會收斂到最佳PID常數值
●執行調諧
(AT)必須手動指示執行自動調諧。
(ST)由控制器自動執行
(ST)除非控制狀態改變(例如,目標值改變或響應變得振盪時),否則不執行
●調諧期間的響應
(AT)由於開/關控制,控制受到干擾。
(ST)由於未執行開/關控制,因此不會干擾該控制。
●當受控對象的特性發生波動時
(AT)有必要再次執行自動調諧
(ST)PID常數由控制器自動設置
自調諧功能與自動調諧功能的不同之處在於,它會觀察正常的控制響應波形並自動計算並設置PID常數。
■結論
(1)對於設備啟動時的首次調諧,請使用“自動調諧”一次獲得一個良好的常數,並使用“自調諧”來響應“自動調諧”之後的特性波動。 。
(2)在某些情況下無法使用自動調諧。
在這些情況下,請勿使用自動調諧,而要進行手動調諧。