control")
Differential (PD) control is used to improve control response.
Unlike the integral control, the derivative control has no control ability by itself.
Used in conjunction with proportional control as proportional differential control.
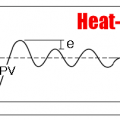
Differential control uses the rate of change of error per unit time.
If the measured value is approaching the set point quickly, User need to loosen the actuator early to get a smooth approach to the set point.
Conversely, if the measured value deviates quickly from the set value, User need to deal with it proportionally.
Used for camera autofocus and servo motor rotation angle control.
Differential control provides proactive control.
If the controlled object has a delay element, overshoot always occurs unless differential control is used.
Differential control has a large output when the change is large.
If differential control is too effective, hunting will occur.
In addition, in the overshoot zero mode setting, when the temperature is rapidly rising toward the set value, if the differential control is too effective, the rise stops once before reaching the set value, and then rises again from there. May move.