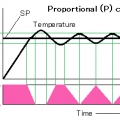
■ PID功能
我想消除偏移並使控制響應更快。 使用PID行為來滿足這兩個要求。
PID控制的基礎是
1)比例動作(比例動作:P動作),輸出與當前偏差成比例的校正量,
2)積分作用(Integral Action:I action),其輸出與過去偏差的累積值成比例的校正量,
3)微分作用(微分作用:D作用),輸出與趨勢的大小成比例的校正量,而不管將來的預測值或偏差是增加還是減少。
PID是這三個的總和。
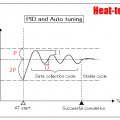
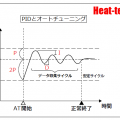
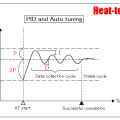
是啟動時表現出的特性,稱為“動態特性”。
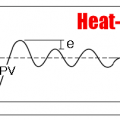
此外,當在目標值和實際值之間發生偏差時,即,當發生偏差時,
4)比例動作是“跟進”動作,可立即響應偏差的變化。
5)積分操作執行“連續跟進”操作,在該操作中將繼續輸出控制輸出,直到偏差變為零,即直到目標值和實際值完全相同為止。
6)差分操作是一種“跟進”操作,可根據偏差變化率的大小預測未來的運動,並輸出與此相對應的控制輸出。
換句話說,在PID控制中,通過組合“立即跟進”,“連續跟進”和“預見跟進”的動作來進行控制以進行改變。
這是在穩定狀態下表現出的特性,稱為“靜態特性”。
從“現在/過去/未來”和“響應/繼續/預見”這六個方面僅用三個要素,就可以在兩種狀態下進行穩定控制:“動態特性”和“靜態特性”。 製作100年來,它已在許多地方使用。
■ PID的發展
控制的發展")
● 在古羅馬,有必要給供水系統的虹吸管放水。
控制的發展")
使用了石頭排氣閥。
滿水時,不塞住從洞漏水的話,滑坡成為糾紛的原因。
很簡單,但這是ON-OFF控制的起源。
控制的發展")
排氣閥的結構
A 浮子
B 空氣池
C 水
D 水管
E 帶有石材雕刻的閥門箱
水管中混入的空氣會降低水位並降低浮子,因此出氣口打開並排到室外。
空氣不足時,水位上升,浮子上升,從而關閉排氣口

● 詹姆斯·瓦特
(James Watt,1736年– 1819年,蘇格蘭工程師)
1778年,創建了一個名為“馬力”的單元,作為代表蒸汽機輸出的單元。
對於蒸汽機控制,我們通過使用離心擺(飛球)的比例方法開發了一種閥開度控制機構。

飛球

飛球結構

● 德普羅尼
Gapard ClairFrançoisMarie Riche de Prony 1755-1839法國數學家和液壓工程師
控制的發展")
Prony頻率分析方法的發明者Dobroni在1791年開發了積分控制方法。

● 斯羅普
(Horatio Nelson Throop 1807-1884美國造船工程師/船長)
1857年,他開發了比例微分控制技術來控制蒸汽機。

● 詹姆斯·克萊克·麥克斯韋
(James Clerk Maxwell)(以蘇格蘭理論物理學家“麥克斯韋的魔鬼”而聞名,1831-1879年)
1868年,他發表了一篇名為“On Governor”的論文,通過對控制操作進行動態研究來闡明穩定控制的條件。

“On Governor”封面

● 斯佩里
Elmer Ambrose Sperry(1860-1930)美國發明家和企業家
他被譽為“現代導航技術之父”。
控制的發展")
在1911年,他開發了使用海洋陀螺羅盤的PID控制器,用於船舶的自動轉向。

● 美國福克斯波羅公司
Foxboro(自2014年起為施耐德電氣公司)
1912年,開發了一種能夠更改設置值的ON-OFF控制器。

● Minorsky
在1922年,米諾斯基(尼古拉斯·米諾斯基(Nicolas Minorsky,1885-1970年美國數學家))發表了一篇關於Sperry所設計的用於船舶自動轉向的PID的論文。
控制的發展")
1922年,他撰寫了Sperry撰寫的有關PID的論文,該論文用於船舶的自動轉向。

● 美國Foxboro
(自2014年起為施耐德電氣公司)
1931年,創建了一個名為Stabilog Model 10的氣動差動PI控制器。

● 泰勒儀器公司
Taylor Instruments Inc.(現為ABB Inc.的一部分)
-1936年,創建了一個名為“ Double Response Plus Plus Full Scope”的氣動可變PI控制器。 據說這是PID控制器的原型。
控制的發展")
-創建了具有記錄功能的變量PID控制器,1939年命名為Full Scope 100。