control")
微分(PD)控制用於改善控制響應。
與積分控制不同,微分控製本身沒有控制能力。
與比例控制一起用作比例微分控制。
微分控制使用每單位時間的誤差變化率。
如果測量值快速接近設定點,則必須提早鬆開執行器,以更平穩地接近設定點。
相反,如果測量值與設定值的偏差過快,則需要按比例處理。
用於相機自動對焦和伺服電機旋轉角度控制。
微分控制提供主動控制。
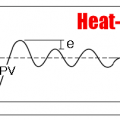
如果受控對象具有延遲元件,則除非使用微分控制,否則總是會發生超調。
當變化較大時,差動控制具有較大的輸出。
如果微分控制太有效,就會發生振盪。
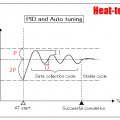
此外,在過衝零模式設置中,當溫度快速上升到設定值時,如果微分控制效果太好,則在達到設定值之前停止上升一次,然後從那裡再次上升。 可能會移動。